Open Source Rover
in Robots
According to NASA, the Open Source Rover is
“The JPL Open Source Rover is an open source, build it yourself, scaled down version of the 6 wheel rover design that JPL uses to explore the surface of Mars. The Open Source Rover is designed almost entirely out of consumer off the shelf (COTS) parts. This project is intended to be a teaching and learning experience for those who want to get involved in mechanical engineering, software, electronics, or robotics.”
void Screen::display_state(){
if (state == RUNNING){
RGBmatrixPanel::drawPixel(STATE[0], STATE[1], RGBmatrixPanel::Color444(GREEN));
}
else if (state == IDLE){
RGBmatrixPanel::drawPixel(STATE[0], STATE[1], RGBmatrixPanel::Color444(RED));
} else if (state == 0x00){
RGBmatrixPanel::drawPixel(STATE[0], STATE[1], RGBmatrixPanel::Color444(WHITE));
}
}
- A sample of the code that the OSR runs on
The Open Source Rover will run on a Raspberry Pi and be built out of “consumer, off-the-shelf” parts.
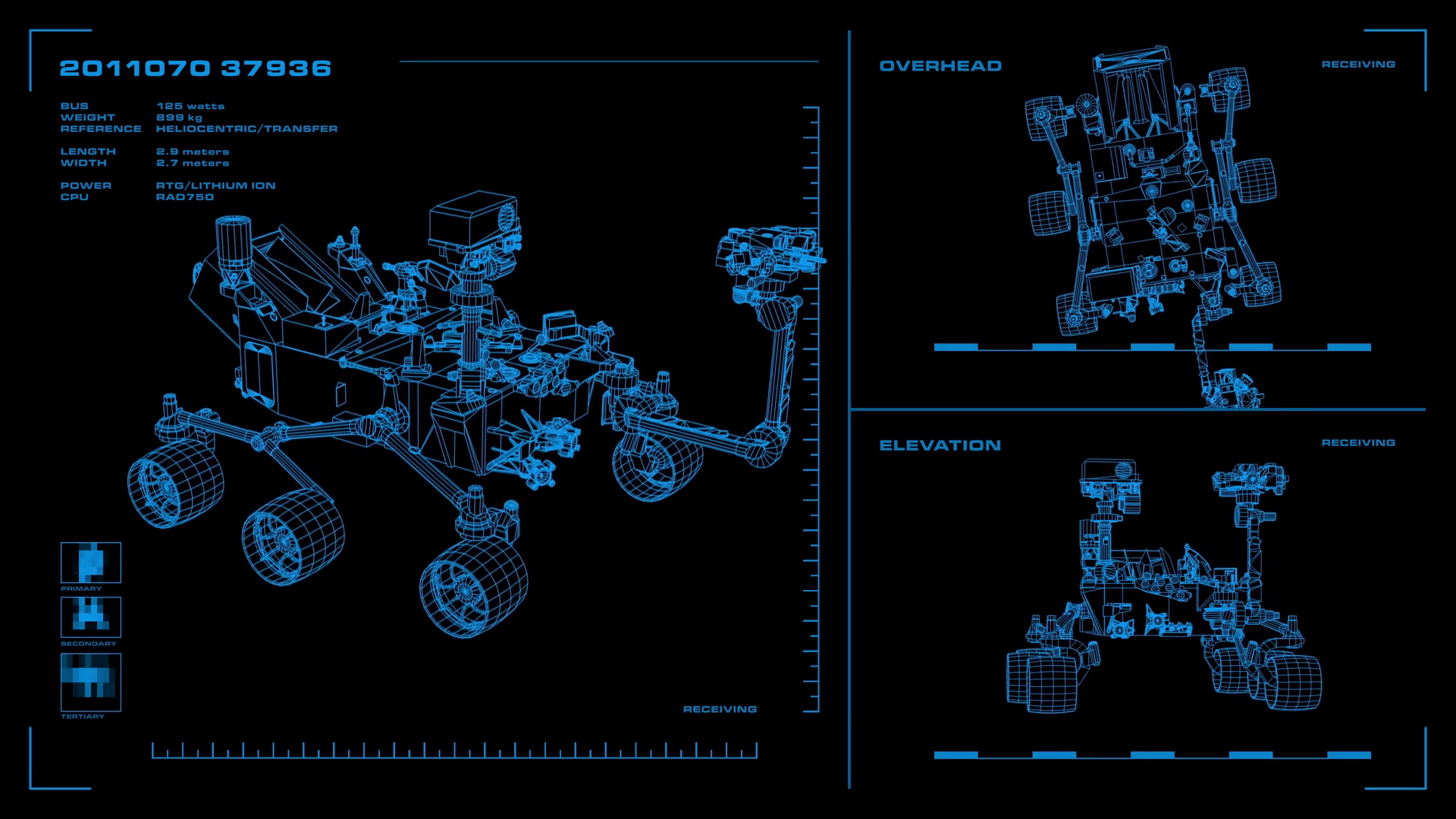
Technical Attributes of the Rover
From Github/NASA-JPL/Open-Source-Rover
| Weight | 25 [lbs] | 11.34[kg] |
| Footprint | 24x14 [in] | 60.96x30.48 [cm] |
| Battery Capacity | 5200 [mAh] | 5200 [mAh] |
| Battery Discharge Rate | 8 [A] | 8 [A] |
| Nominal Current Draw | 1.2 [A] | 1.2 [A] |
| Operating time | 5 [hrs] (continual use) | 5 [hrs] (continual use) |
| Approximate Max speed | 9.7 [in/s] | 24.6 [cm/s] |
| Maximum 90 deg vertical scale | 12 [in] | 30.48 [cm] |
| Maximum height differential between sides | 14 [in] | 35.56 [cm] |
| Communication (in this guide) | Bluetooth app (Android only) and Xbox Controller | |
| Cost | ~ $2,500 |
Notes
- Cost is in US Dollars
- We are using metric measurements
- We will probably use an Android app, maybe with the Arduino Esplora we acquired
We’ve forked this repo to Github/Acord-Robotics/Open-Source-Rover
- We can change the parts, however by changing the parts we may improve one thing but compromise another -
“One potential change is for the motors; you can, for example, select higher RPM motors (to drive your rover faster) at the sacrifice of max stall torque, which would potentially limit your rover’s ability to climb” (from the Project’s Readme)
We can use our Arduino Esplora Board to communicate with the Raspberry Pi - as the board has a joystick and buttons, so it is sort of a mini-controller
There is a Tapatalk Forum - Landing Site
The partslist is located here & on the ACORD forums - you need to log in to view the ACORD forums. Join ACORD!
Stellarios
Stellarios is the official operating system and app of ACORD. Stellarios will be designed to work on MacOS & Windows devices, and there will be apps created for Android, iOS & Linux devices. Stellarios is going to be a bundle of applications that will be used by ACORD Corporation members to perform certain operations.